聊一聊etcd系列之一:层级概况与知识梳理
etcd在微服务领域使用场景十分普遍,经常用于作为一个注册中心,提供服务注册与发现。本系列将聊一聊etcd解决了什么问题、它是如何解决的角度来逐步分析。

前言
etcd在微服务领域使用场景十分普遍,经常用于作为一个注册中心,提供服务注册与发现常见的比如K8S框架就以etcd作为基础组件进行内部交互。近期在梳理etcd的一些内部结构与依赖组件,发现其背后有广泛的技术栈,这里分享总结一些技术细节作为沉淀。
它解决了什么问题
etcd的定位是通用的一致性KV存储,但在面向服务注册与发现的应用场景中,大概有这几个使用方式:
- 注册/配置中心 KV存储
- 服务发现
- 分布式锁
它是如何解决的
分层设计
分层设计是软件开发的基本思路,etcd也采取模块分工,将各个内部组件分开实现,做到各司其职,从API层到逻辑层,再到底层文件存储,大体拆分为三大模块,本系列将依据这个思路,逐章拆解。
今天尝试先从整体视角梳理大部分的技术栈,关于细节实现将在后续源码分析深入介绍。这个系列将拆分为下面几个大模块进行分析,如果感兴趣的可以关注一下~
一致性协议
提到分布式存储,分布式协议自然是离不开的,etcd底层依靠raft一致性算法保障一致性,采用选举策略定期更新各个节点当前状态。
通信方式
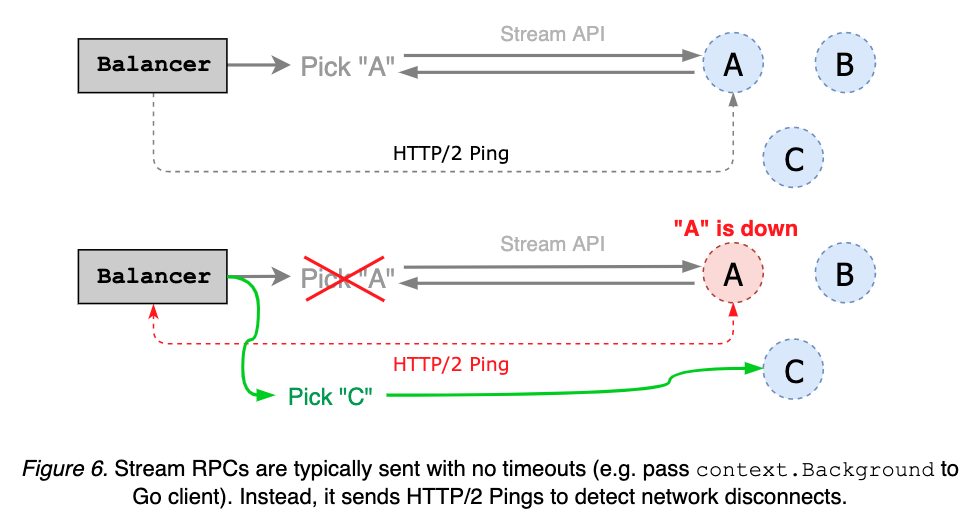
etcd节点间通信方式是经过更新迭代的(v2->v3),v2使用HTTP/1.X协议,基于RESTful API通信;v3在兼容v2的基础上增加了HTTP/2.x grpc协议的支持,在多路复用的场景提升了传输效率,基于Stream API长连接进行活性检测。
 此外,etcd还暴露了友好API屏蔽底层的复杂的应用程序逻辑,提供多台物理机的一个逻辑集群视图。
此外,etcd还暴露了友好API屏蔽底层的复杂的应用程序逻辑,提供多台物理机的一个逻辑集群视图。
数据存储
关于etcd数据的底层存储,主要依赖于预写日志(WAL)以及BoltDB存储引擎来实现,所有数据在提交之前会保障写入WAL做数据持久化,BoltDB的细节实现将会在后续系列展开细说,大概用到这几个技术点:
- B+树、KV数据库,“读多写少”
- 结合COW无锁读写并发
- mmap(内存映射磁盘技术),零拷贝
其中etcd花了大量的篇幅来做节点的多版本控制(MVCC),依赖的是底层B+树和内存B树结构的索引映射,它们之间是如何关联的将在后面另起篇幅展开聊聊。
脉络图
关于etcd整个技术栈其实可以纵横扩展,这里梳理了一张脉络图,这个系列会结合这个脑图进行开展,大家也可以结合自己感兴趣的点进行深入接触。

参考链接
- etcd文档
https://etcd.io/docs/v3.5/learning/ - Deep Dive: etcd
https://www.youtube.com/watch?v=DrtdrdwDpZE - raft pdf
https://raft.github.io/raft.pdf